ConvolutionWhat does the term convolution mean?
|
|
Have you ever used an app to remove red eye from a photo, sharpen a blurry picture, or change image contrast? If so, then you have already used a convolution filter without knowing it!
|
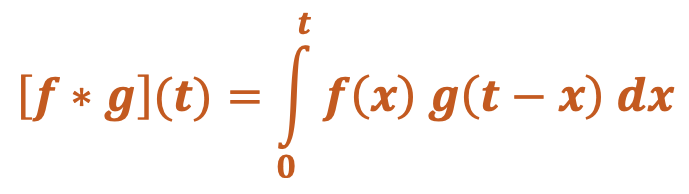
In pure mathematical terms, a convolution represents the blending of two functions, f(x) and g(x), as one slides over the other. For each tiny sliding displacement (dx), the corresponding points of the first function f(x) and the mirror image of the second function g(t−x) are multiplied together then added. The result is the convolution of the two functions, represented by the expression [f *g](t).
|
Cross-correlation ("Convolution") of two functions, f and g.
(from Wolfram MathWorld) |
|
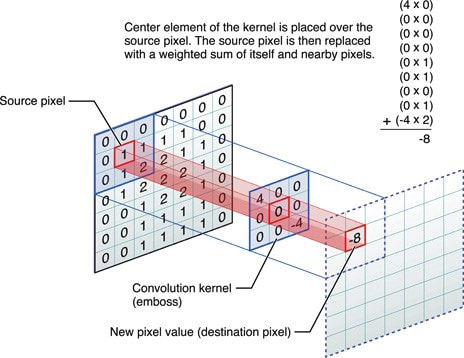
In image processing, convolution is performed by sliding a small array of numbers, typically a matrix of size [3x3] or [5x5], sequentially over different portions of the picture. This convolution matrix is also known as a convolution filter or kernel. For each position of the convolution matrix, the corresponding pixel values are multiplied and added together to replace the original center pixel. In this way the values of the neighboring pixels are blended together with that of the central pixel to created a convolved feature matrix. The relative values of the matrix elements determine how that blending will affect the transformed image.
|
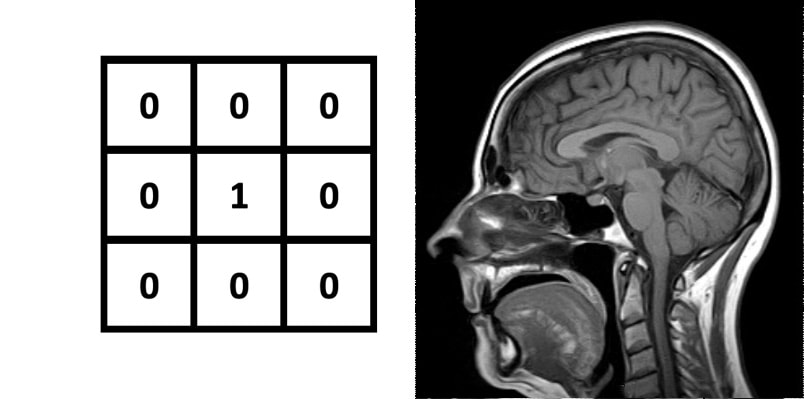
Identity Kernel: Just the starting image itself.
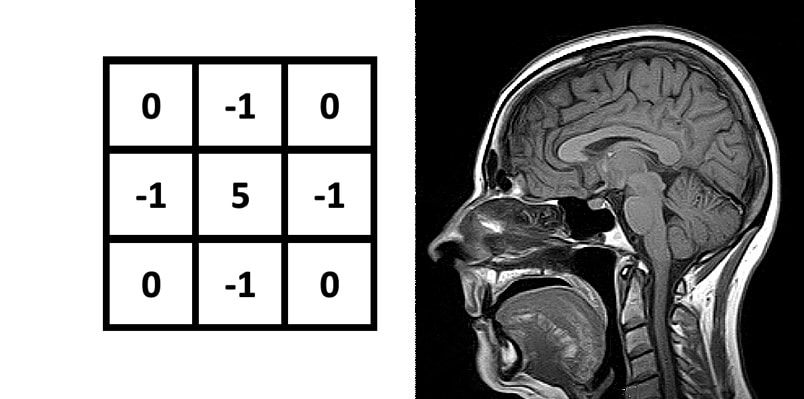
Sharpen Kernel:: Differences emphasized with its adjacent pixel values.
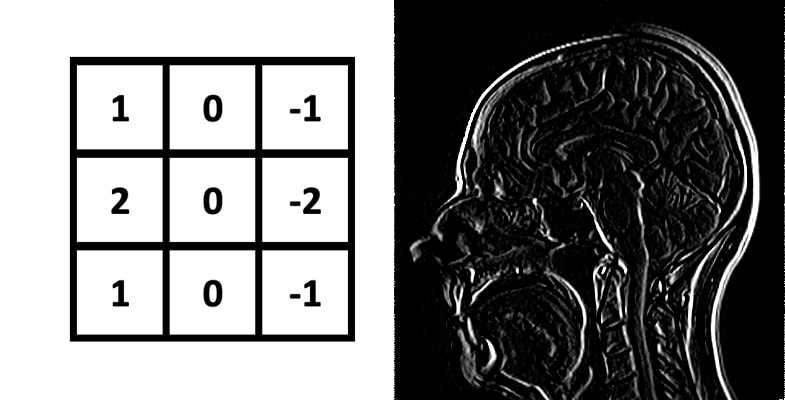
Left-to-right Sobel Kernel:. Used to accentuate differences between pixels along the horizontal axis
|
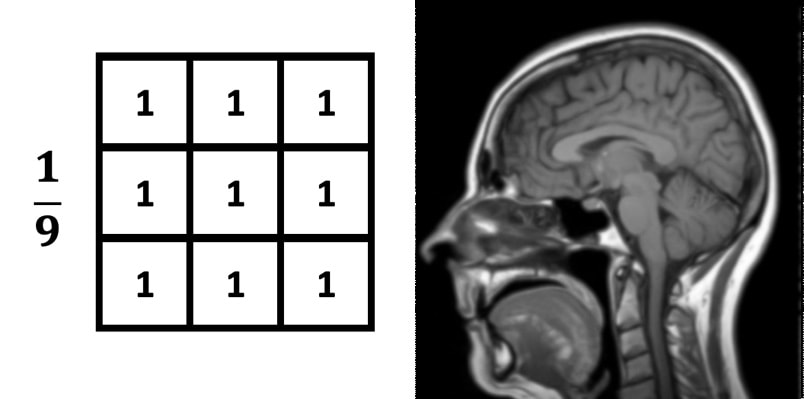
Box Blur Kernel: Each pixel is averaged equally with its 8 neighbors.
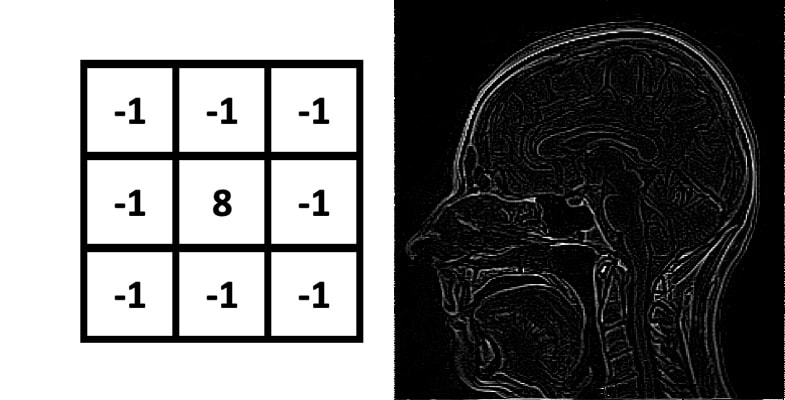
Outline ("Edge") Kernel: Highlights neighboring pixels with large differences of intensity.
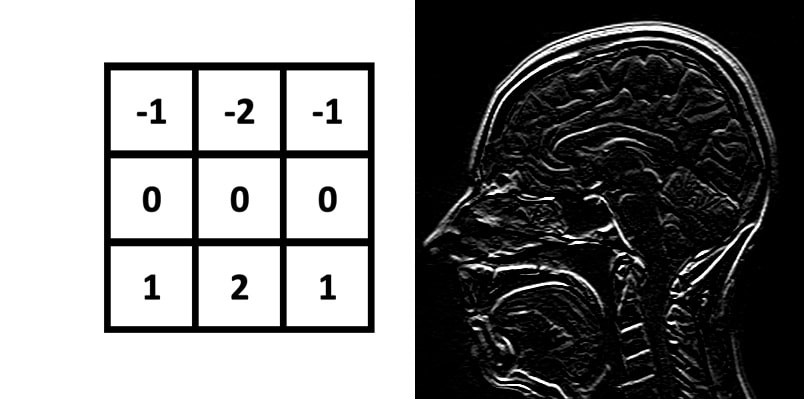
Superior-to-inferior Sobel Kernel: Used to accentuate differences between pixels along the vertical axis.
|
These simple examples utilize 2D (planar filters), which are appropriate for black & white images such as those generated by magnitude-reconstructed MR. Color images are commonly split into three channels (Red/Blue/Green) requiring 3D convolutional kernels. Similarly, more complex MR images (containing phase or velocity information, for example) may require higher dimensional filters.
References
Amidi A, Amidi S. VIP Cheatsheet for CS 230 - Deep Learning: Convolutional Neural Networks. Stanford University; 2019:1-5. [Downloaded from this Link 6-22-22]
Ganesh P. Types of convolution kernels: simplified. Toward Data Science. 2019:1-12. [Downloaded from this link 2-9-22]
Weisstein, Eric W. "Convolution." From MathWorld--A Wolfram Web Resource (downloaded from https://mathworld.wolfram.com/Convolution.html 6 Feb 2022)
Amidi A, Amidi S. VIP Cheatsheet for CS 230 - Deep Learning: Convolutional Neural Networks. Stanford University; 2019:1-5. [Downloaded from this Link 6-22-22]
Ganesh P. Types of convolution kernels: simplified. Toward Data Science. 2019:1-12. [Downloaded from this link 2-9-22]
Weisstein, Eric W. "Convolution." From MathWorld--A Wolfram Web Resource (downloaded from https://mathworld.wolfram.com/Convolution.html 6 Feb 2022)